
一,激光雷达含义
三维激光雷达扫描使用的是LiDAR(Light Detection and Ranging),它是激光探测及测距系统的简称,还可以称为Laser Radar或者LADAR(Laser Detection and Ranging),激光雷达点云数据就是由激光雷达扫描获取的。当一束激光照射到物体表面时,所反射的激光会携带方位、距离等信息。若将激光束按照某种轨迹进行扫描,便会边扫描边记录到反射的激光点信息,由于扫描极为精细,则能够得到大量的激光点,形成激光点云。根据这种方法得到的点云,一般具有x,y,z坐标值和激光反射强度4种信息,再搭载RTK/PPK,还可获取点云的地理坐标信息。
二、电力塔含义
电力塔是一种用于架空电线的塔状建筑物,通常由钢架结构构成,高度一般在25-40米之间。电力塔在电力系统中起着至关重要的作用,它不仅能够支撑和保护电线,还能有效地传输高压电。电力塔的设计、制造、安装和维护都是现代电力系统运行与发展的重要保障。电力塔广泛应用于野外的发电厂和配电站附近,其多样的类型和结构使其能够适应不同的电力传输需求。无论是城市供电还是远距离输电,电力塔都是不可或缺的基础设施。
三、输电杆塔无人机巡检
1. 业务痛点
(1)输电塔型多样,细小的缺陷都会导致线路故障或电量损失,影响生产生活用电。
(2)输电通道距离长,单塔人工巡检效率有限,山林之间人工徒步异常艰苦;
(3)环境复杂,涉及高海拔地区、人员密集城区、山区;
(4)结构复杂,巡检点位多,人工巡检工作量极大,难以保证巡检质量;u数据难保存,传统人工巡检过程无法数字化记录、留档
1.激光雷达:大疆智图支持对禅思激光雷达采集到的点云数据进行一键式高精度处理。过程包括轨迹解算和点云精度优化,可直接生成多种标准格式的三维点云。在进行地面点分类后,支持输出数字高程模型(DEM)和等高线成果。通过导入控制点,可实现精度控制,输出高精度点云文件。质量报告和剖面查看功能有助于分析点云质量。即使 RTK 实时差分数据意外丢失,大疆智图仍可通过 PPK 功能与离线基站数据匹配,重建高精度模型。
2.实时三维:基于 DJI 先进的实时重建算法,将无人机采集的数据可视化,实时生成高精度、高质量三维模型,满足事故现场、工程监测、电力巡线等场景的展示与精确测量需求。
3.精细化巡检:基于本地实景三维模型或点云结果选择拍摄目标,自动生成拍摄航点及航线,同时可显示航点对应的模拟相机图传画面,让航点选择更精准,航线规划更合理,实现巡检作业流程自动化。
2.外业航测流程
(1)初期人工介入飞行
使用 Matrice 350 RTK 搭载禅思 L2 ,在手薄 Pliot 2中导入提前规划的KML路径或现场绘制,做好航线规划;使用非重复扫描模式,激光雷达的穿透性更强,输电线点云模型和走向,获得更多结构信息。作业人员可在现场预览、回放和拼接点云模型,并获取外业质量报告,高效开展作业任务。进行大疆智图一站式后处理,即可获取高精度点云成果
(2)后期自主电力巡检
使用输电通道电塔基础位置信息规划,制作出激光雷达扫描航线;将建模扫描航线导入手薄Pliot 2中,配置任务信息;通过先前航测采集输电线路点云模型,使用大疆智图进行输电通道航线规划,再将航线任务导入 Matrice 350 RTK ,一键下达巡检指令;通过对巡检照片进行人工分析或AI识别,识别输电通道中缺陷部位。
、回溯。
2. 无人机优势
(1)长距离巡检,减少人工徒步辛劳,有效作业距离翻倍;
(2)高空视角巡检,有效保障人身安全;
(3)高效精准拍摄巡检点,保证巡检作业质量;
(4)输电通道模型重建,数字化管理资产,模型用途多样化
通过无人机自主飞行应用,可对输电杆塔做精细化的日常巡检,及时发现问题并解决。
四、无人机航测流程
1.设备使用情况
(1)多旋翼无人机

(2)无人机载荷

最长飞行时间:55分钟
环境感知:前后左右上下,视觉+红外传感器,六向感知避障
环境适应性:IP55 防护,最高7000米起飞海拔,-20~ 50°C工作环境温度
开机即作业,单架次作业面积2.5平方公里
融合 GNSS、高精度自研位姿系统,高程精度可达4厘米,平面精度达5厘米
最大支持5回波,获取更多地面点云
最大点云发射率均可达240,000 点/秒,单位时间内可获取更多点云数据
集成框幅式激光雷达、高精度自研惯导和 4/3 CMOS 可见光测绘相机
量程达250米(反射率10%,100 klx)、450米(反射率 50%,0klx)
(3)处理软件
1.激光雷达:大疆智图支持对禅思激光雷达采集到的点云数据进行一键式高精度处理。过程包括轨迹解算和点云精度优化,可直接生成多种标准格式的三维点云。在进行地面点分类后,支持输出数字高程模型(DEM)和等高线成果。通过导入控制点,可实现精度控制,输出高精度点云文件。质量报告和剖面查看功能有助于分析点云质量。即使 RTK 实时差分数据意外丢失,大疆智图仍可通过 PPK 功能与离线基站数据匹配,重建高精度模型。
2.实时三维:基于 DJI 先进的实时重建算法,将无人机采集的数据可视化,实时生成高精度、高质量三维模型,满足事故现场、工程监测、电力巡线等场景的展示与精确测量需求。
3.精细化巡检:基于本地实景三维模型或点云结果选择拍摄目标,自动生成拍摄航点及航线,同时可显示航点对应的模拟相机图传画面,让航点选择更精准,航线规划更合理,实现巡检作业流程自动化。
2.外业航测流程
(1)初期人工介入飞行
使用无人机,系统导入提前规划的KML路径或现场绘制,做好航线规划;使用非重复扫描模式,激光雷达的穿透性更强,输电线点云模型和走向,获得更多结构信息。作业人员可在现场预览、回放和拼接点云模型,并获取外业质量报告,高效开展作业任务。进行大疆智图一站式后处理,即可获取高精度点云成果
(2)后期自主电力巡检
使用输电通道电塔基础位置信息规划,制作出激光雷达扫描航线;将建模扫描航线导入手薄Pliot 2中,配置任务信息;通过先前航测采集输电线路点云模型,使用大疆智图进行输电通道航线规划,再将航线任务导入 Matrice 350 RTK ,一键下达巡检指令;通过对巡检照片进行人工分析或AI识别,识别输电通道中缺陷部位。

现场部署

在DJI Pilot2手簙设置非重复扫描模式,穿透性更强

飞行完成后,可直接在相册中查看点云模型,如遇数据异常可及时补拍
3.内业后处理流程
通过点云轨迹解算和精度优化,可以快速生成标准格式的三维点云。实现一站式点云后处理。此外,该软件还能对地面点进行分类,并输出DEM数字高程模型
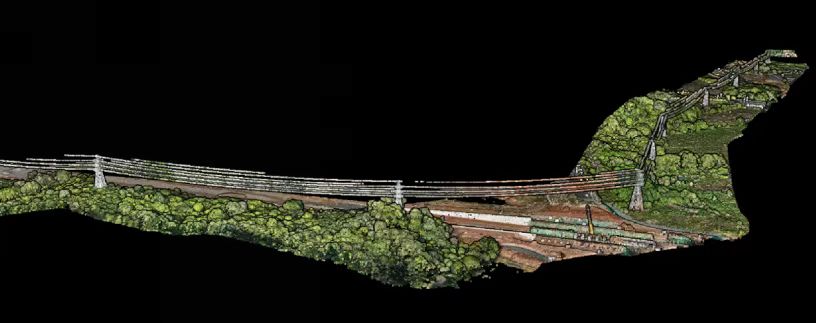
高压电力塔-RGB渲染模式
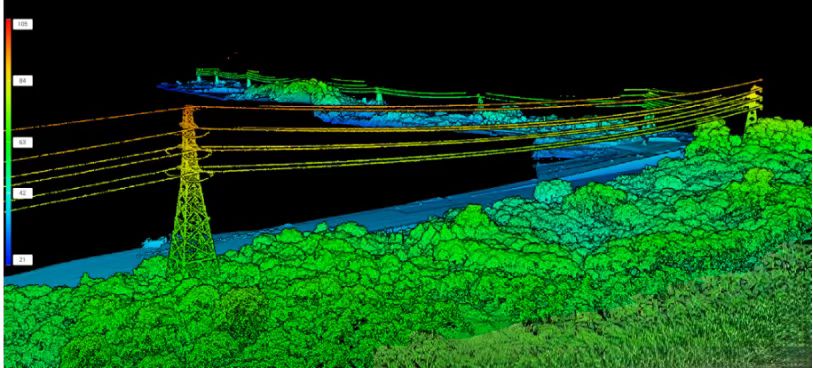
高压电力塔-Elevation渲染模式
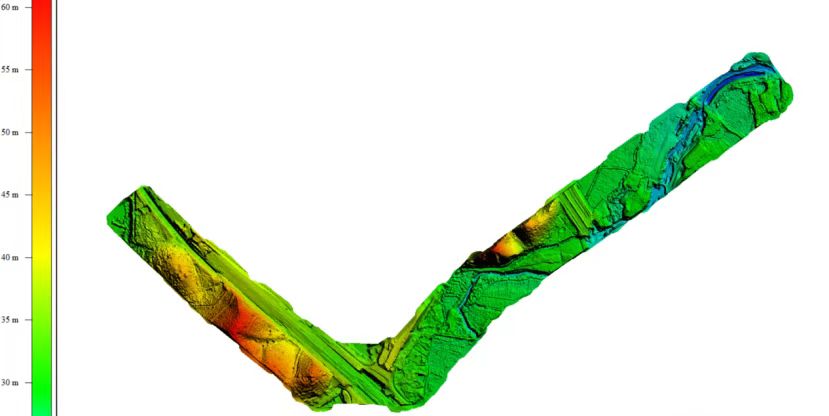
高压电力塔数字高程模型(DEM)
五、电力巡检方案总结
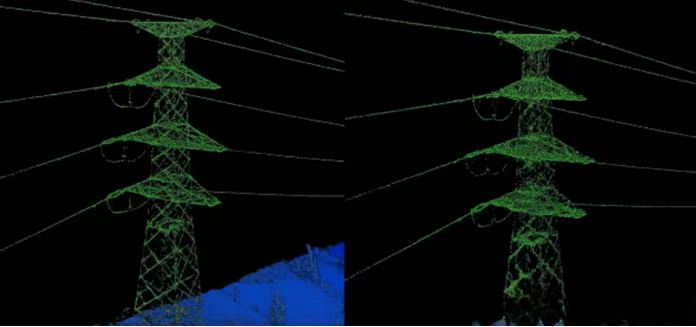
在电力行业,激光雷达可以通过获取三维点云数据精准识别杆塔金具、电线或绝缘子这种细小物体,并输出分析报告;此外,通过电塔点云实现离线航线规划,生成自主飞行路线,辅助电力部门进行精细的电力设施巡检,提高探测效率。
通过无人机的高速飞行能力,搭配激光雷达激光雷达采集点云,利用多回波特性,高效获取高精度、穿透力强、光斑小的电力线三维点云数据,经过精度控制与检查功能,分析点云质量与厚度,能够识别线路附近的植被情况,排查树木隐患,保障电网的运维安全。可用于输电线树障分析、杆塔三维数字化。
六、激光雷达航测应用方向
无人机搭载激光雷达的航测解决方案,应用场景丰富,广泛应用于测绘、电力、林业、工程基建等行业,能够满足各种不同行业的需求,为客户提供精准、高效的三维数据一体化解决方案。
在电网运维向智能化、数字化迈进的过程中,三维点云数据模型的重要性日益凸显,而无人机航测大大提高了技术人员外出作业的人身安全性。运维单位可以搭建设备信息管理数据库,实现可视化线路与数字化存档。通过后续点云模型的二次开发,可以参考点云模型规划无人机自动化飞行航线,大幅提升巡检效率。

